Research Summary
Our research primarily concentrates on the mechanics of slender structures and their applications in robotic metamaterials endowed with innovative functionalities.
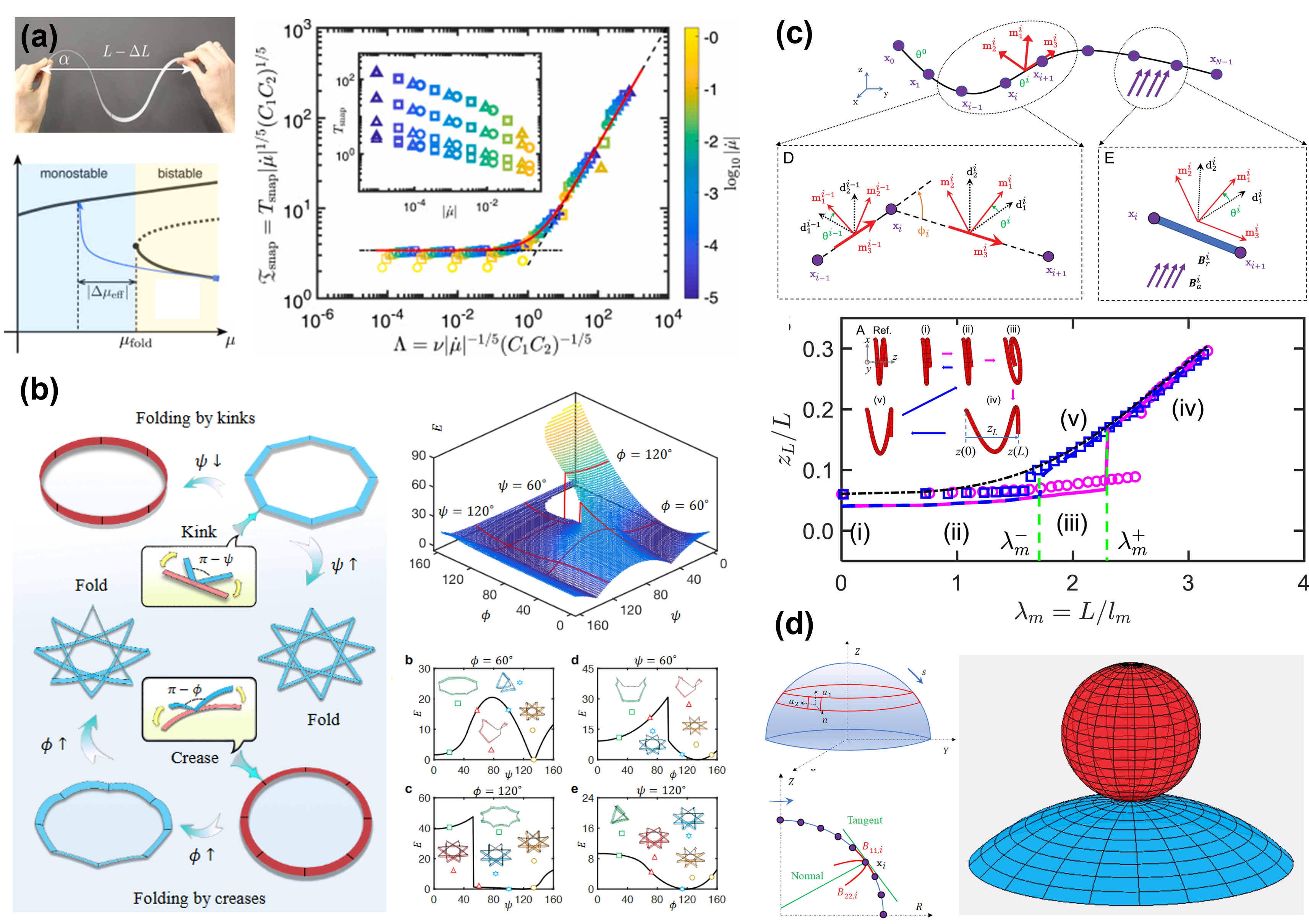
Nonlinear Mechanics of Slender Structures
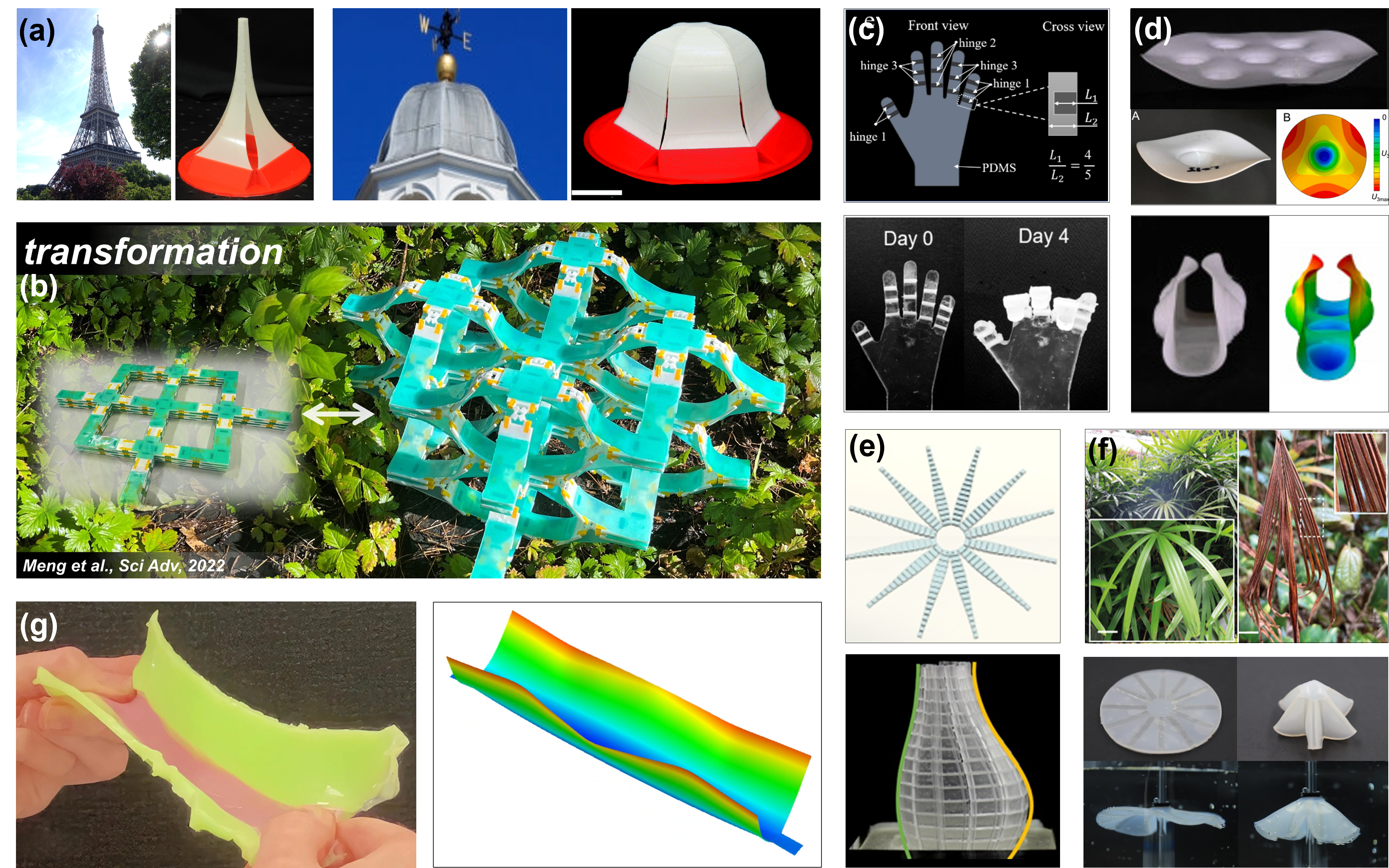
Shape-morphing Metamaterials
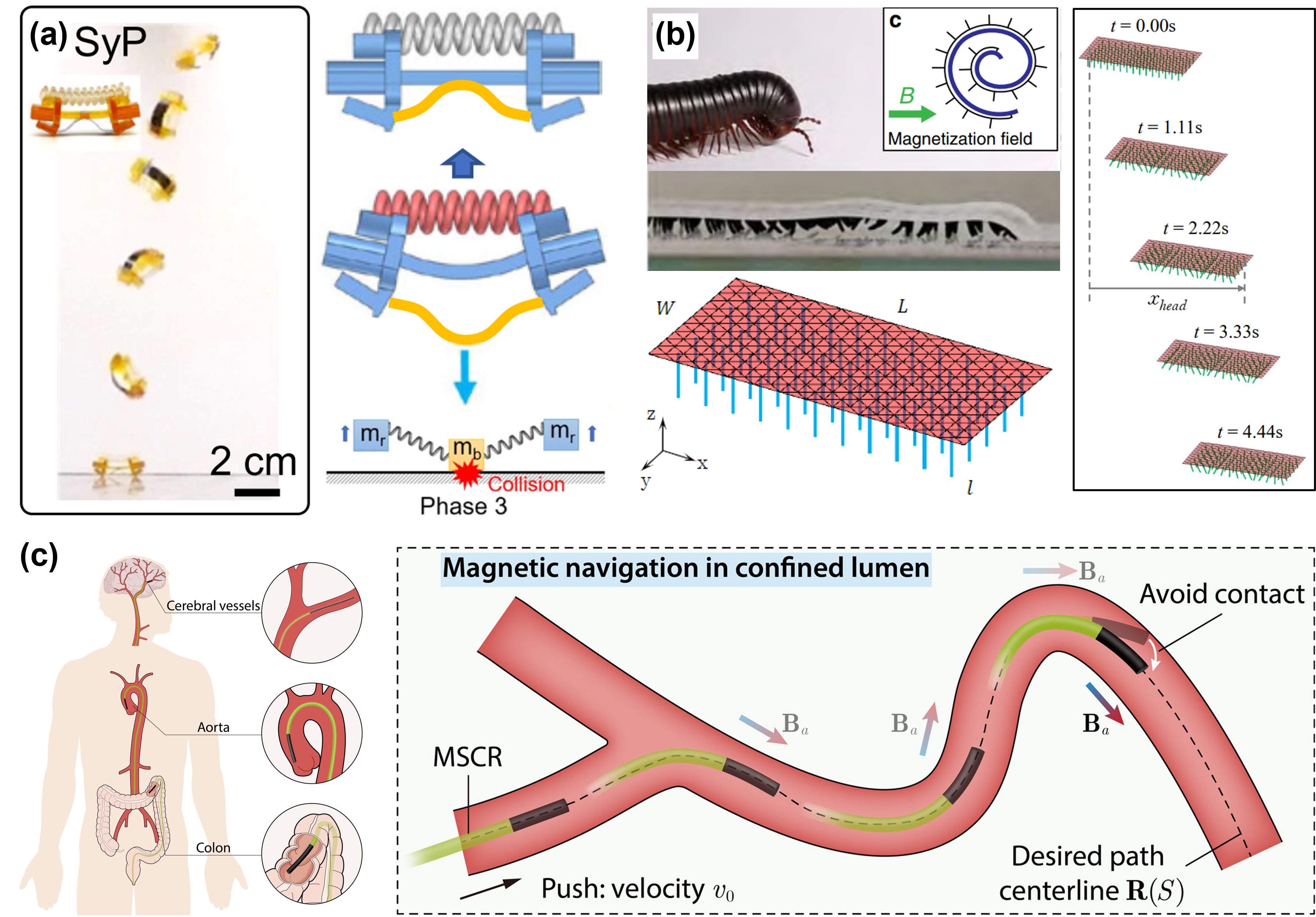
Mechanics and AI-driven Robotic Design and Control